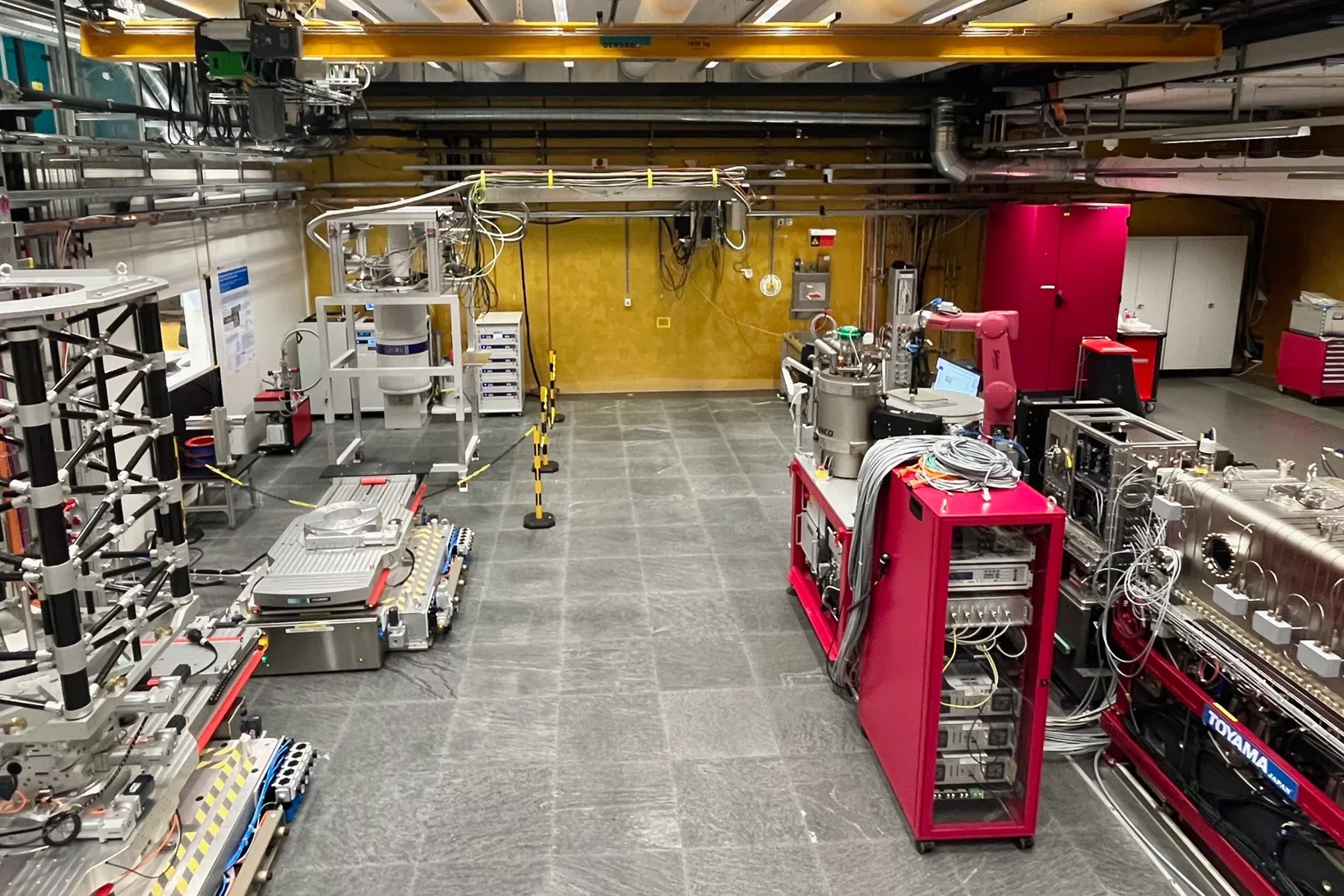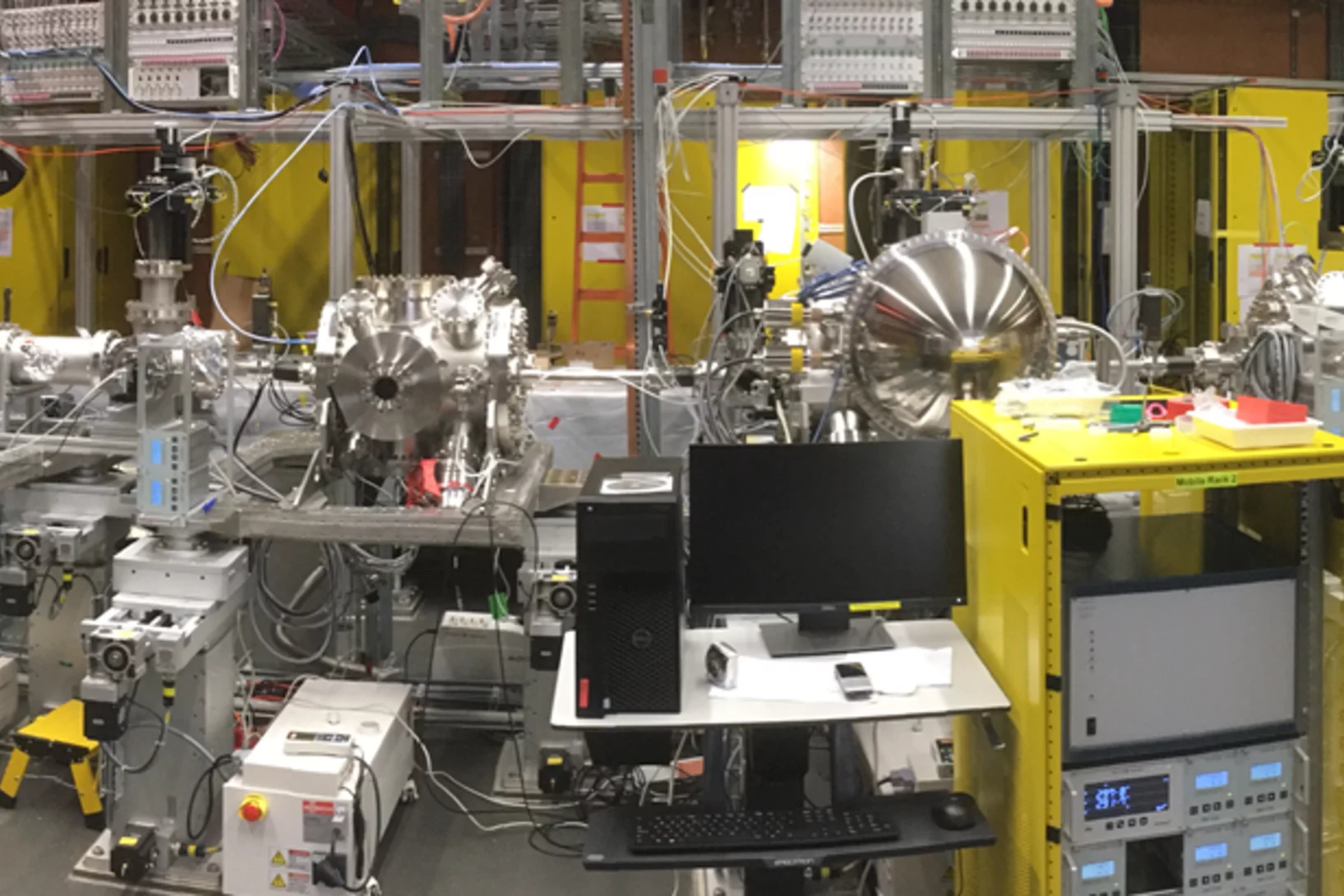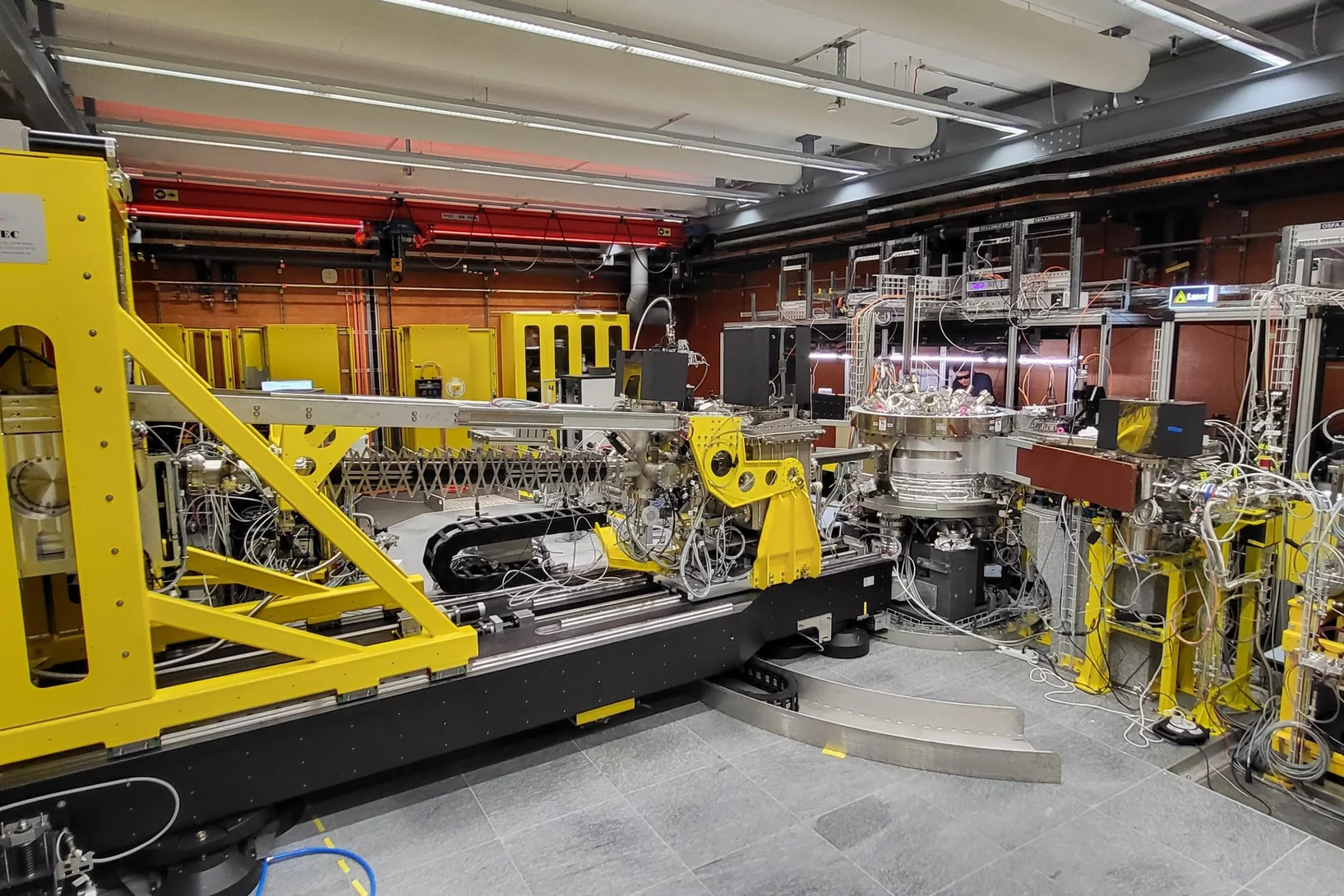
Experimental stations of SwissFEL beamlines ARAMIS and ATHOS
SwissFEL has two beamlines, the hard X-ray beamline ARAMIS as well as the soft X-ray beamline ATHOS.
- hard X-ray FEL, λ=0.1-0.7 nm
- linear polarization, variable gap, in-vacuum undulators
- first users 2017
- operation modes: SASE & self seeded
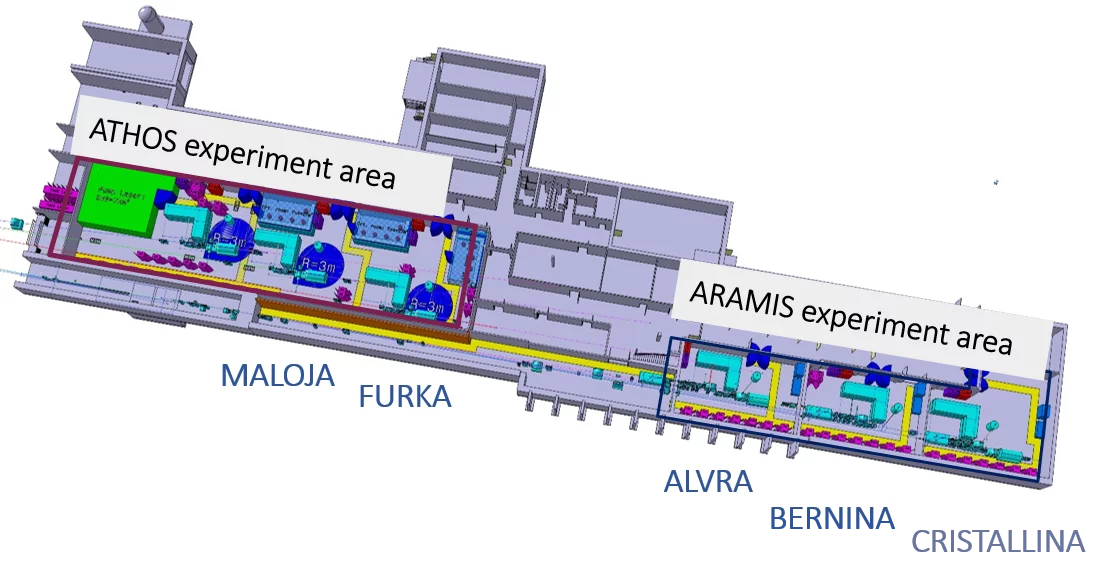
For the ARAMIS beamline, two experimental stations are active and one under construction, namely:

ARAMIS beamline
- experimental station Alvra
- experimental station Bernina
- experimental station Cristallina
The X-ray pulses are deflected by special high precision mirrors to the different experimental stations. Every 10 ms, an X-ray pulse is generated in the ARAMIS beam line

Experimental Endstations
ARAMIS Beamline
All three endstations Alvra, Bernina and Cristallina endstations are available to users. Click on the header to reach their respective homepage.