
Dynamic PSA refers to the integration of plant response models and probabilistic models to analyze scenarios in terms of risk and safety. To achieve this integration, LEA and the NES Laboratory for Reactor Physics and Systems Behavior (LRS) combine their expertise, bringing probabilistic analysis methods such as the dynamic event tree and operator response models and plant transient analysis models that treat thermal-hydraulic and reactor physics.
In the work described below, the classical PSA result, which is based on a quasi-static result, is compared with a scenario analysis enabled by a dynamic, integrated model.
Assessing safety margins in Medium Loss of Coolant Accidents using dynamic-probabilistic modelling
Event tree analysis is the reference modeling approach for the modeling of accident sequences in the Probabilistic Safety Assessments (PSA) of nuclear power plants, in Switzerland and internationally. In event trees, the unfolding of accident sequences is represented as a series of events for the success or failure of the functions or systems required for the facility to reach a safe state. The combinations of equipment failures to be analyzed, the variability in the timing of failures and operator actions, and their dynamic interactions with the plant’s physical response result in countless possible scenario evolutions. In view of the implied computational and analytical requirements, conservative assumptions about failures and dynamic variability are used to define a more manageable number of limiting scenarios. The aims of the work presented here are to quantify the conservatism in the estimated risk associated with the limiting scenarios, and, secondly, to determine whether the insights regarding important contributors are affected by more detailed modeling.
The methodology applied here combines the event model directly with a simulation model of the plant’s physical response, in a so-called dynamic event tree (DET). Given its emphasis on methodology, the study examined medium-break Loss of Coolant Accident (MLOCA) scenarios for the decommissioned Zion nuclear power plant in the U.S.; breaks in this intermediate size range (2-8”) show strong dynamic effects. In particular, larger breaks result in higher rates of coolant loss but depressurize the system more quickly, allowing the low-pressure pumps to inject more effectively and earlier. Conversely, the coolant loss rate is reduced in smaller breaks but the system pressure must be lowered to allow the use of these pumps. When risk is estimated with limiting scenarios, the estimated core damage frequency (CDF) varied by an order of magnitude if 6” instead of 7” is selected for the single break size [1]. Such sensivity underscores the benefits of the DET methodology’s capability to simulate and analyze the variability in the scenarios in accident sequence modeling.
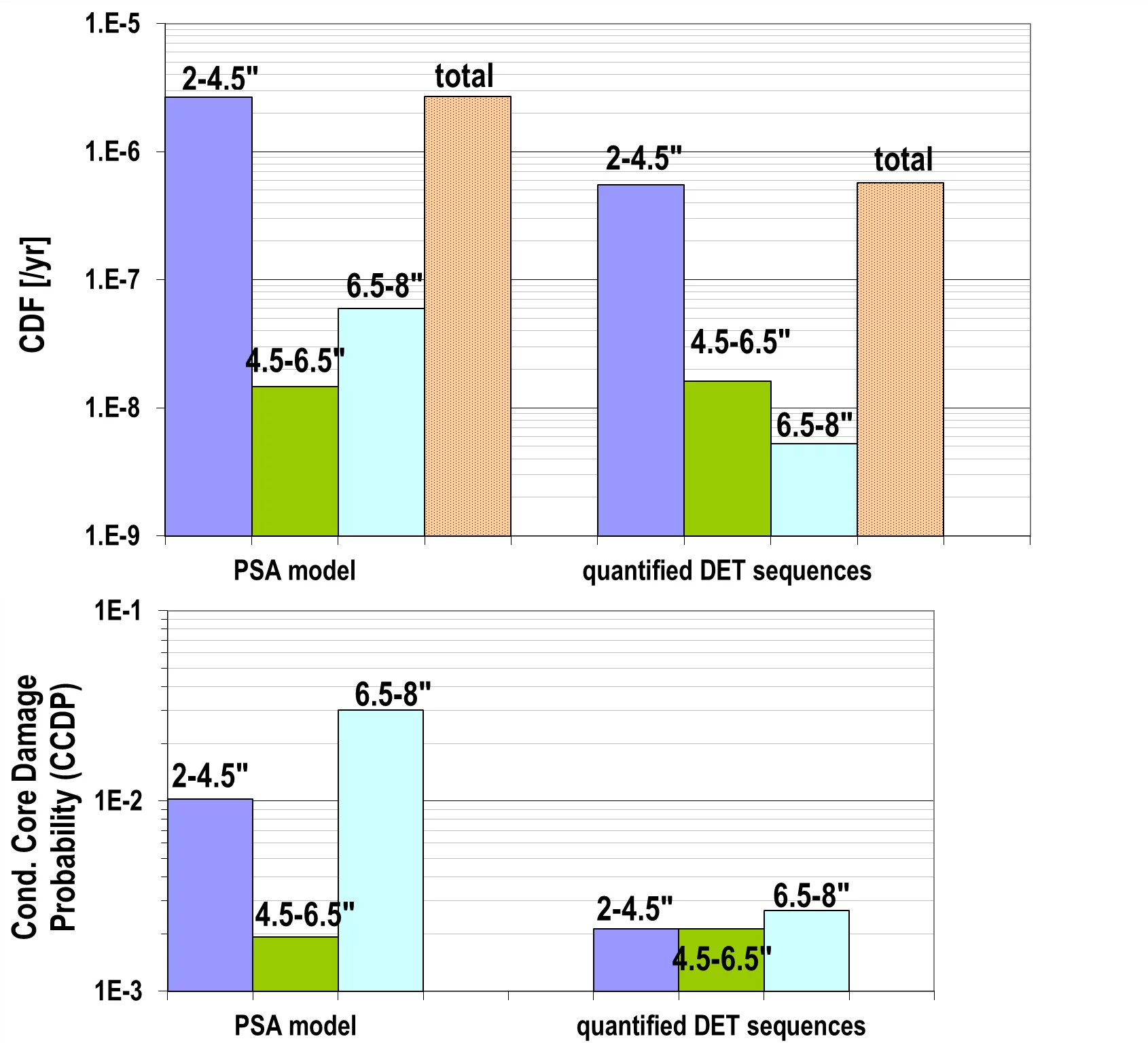
Figure. Results from PSA and from quantified DET sequences (adapted from [2]
In subsequent work, the results of a PSA accident sequence model developed from DET simulations and quantified were compared to those obtained by quantifying the DET sequences [2]. In Figure 8 (upper plot), the difference between the values on the left and right corresponds to the conservatism in the PSA model result. The total CDF estimated with the PSA model is 3.E-6 /yr; in contrast, direct quantification of the DET sequences yields 6E-7 /yr, a reduction of a factor of 5. In both cases, to better consider the influence of the break size on the scenario dynamics, groups of MLOCA scenarios with similar sizes are defined. The core damage probability given that there is a break (the conditional core damage probability or CCDP) for each group is shown in the lower plot; the PSA model identifies the larger breaks as most challenging, followed by the smallest breaks; the DET model shows that given any break size, the conditional core damage probability is actually quite similar for all of the break sizes. The differences seen in the CDF contributions arise from the fact that the smaller breaks have a higher estimated frequency of occurrence.
Overall, the work showed that the integration of plant simulations and event tree in the dynamic event tree allows more scenarios to be used in the safety analysis. Additionally, by explicitly representing more sequences, the DET reduces the estimated risk by eliminating some of the conservative assumptions embedded within the bounding scenarios. Looking further out, the integration of simulations and event trees support an improved treatment of uncertainties.
Text: D.R. Karanki, V.N. Dang
References
Karanki DR, Kim TW, Dang VN (2015), “A Dynamic Event Tree approach to probabilistic accident sequence modeling: Dynamics and variabilities in medium LOCA”, Reliability Engineering & System Safety, 142, 78-91
Karanki DR, Dang VN (2016), “Quantification of Dynamic Event Trees – a comparison with event trees for MLOCA scenario”, Reliability Engineering & System Safety, 147, 19-31
-- Main.VinhDang - 16 Dec 2016